Utilizziamo i cookie per rendere migliore la tua esperienza di navigazione. Per rispettare la nuova direttiva sulla privacy, è necessario chiedere il tuo consenso per impostare i cookie. Per saperne di più.



EC-Simulator virtualizes EtherCAT® networks by simulating the EtherCAT® slave devices in order to run EtherCAT Master applications without real EtherCAT® slave hardware available.
The EtherCAT® simulation is provided on a physical network adapter or virtually, e.g. to realize a completely simulated machine setup. Configuring the simulation instance is seamless using the ENI file of the real network.
Reaction to Process Data, SDOs, Slave Stack interaction, etc. can be programmed using C/C++ or .NET opening the EtherCAT data to various other engineering, testing or virtualizing tools like ISG Virtuos®.
Use Cases
- Virtual Commissioning with a Digital Twin
- Test and optimize the application at an early stage of the engineering, even without any real existing hardware
- Test error scenarios which are dangerous and/or lead to damages
- EtherCAT control system release tests
- Test extended scenarios, e.g., simulate topology changes
- Simulate slave errors
- Simulate huge networks
- Software development and education
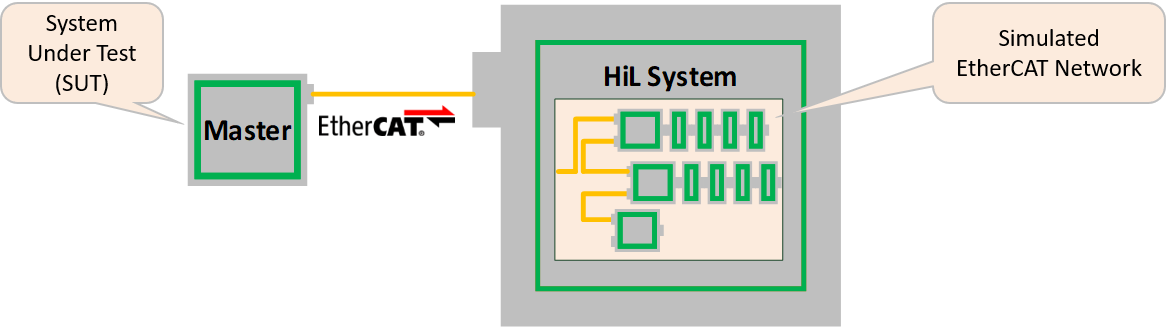
Hardware-in-Loop (HiL) Simulation
The System-Under-Test (SUT) is communicating via an EtherCAT cable with the EC-Simulator software running on an external hardware, the HiL System.
In this setup the unchanged application together with the EtherCAT master can be tested using the standard, physical network interface.
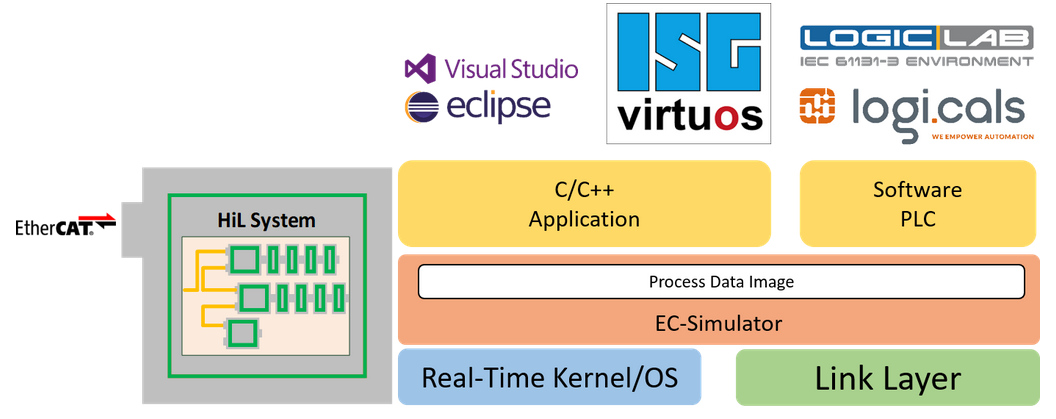
Software Architecture
The EC-Simulator software is ready-to-run on various operating systems, e. g. Linux and Windows, and makes use of the acontis Real-time Ethernet drivers, the so called link layers.
EC-Simulator offers a “C” language API for integration into a Software PLC (LogicLab, logi.cals) or into professional simulation software like ISG Virtuos, etc.
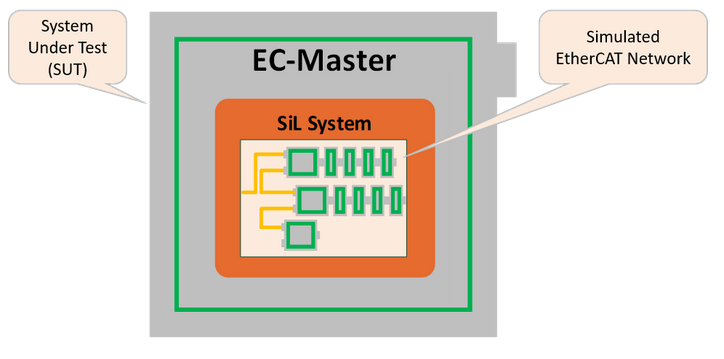
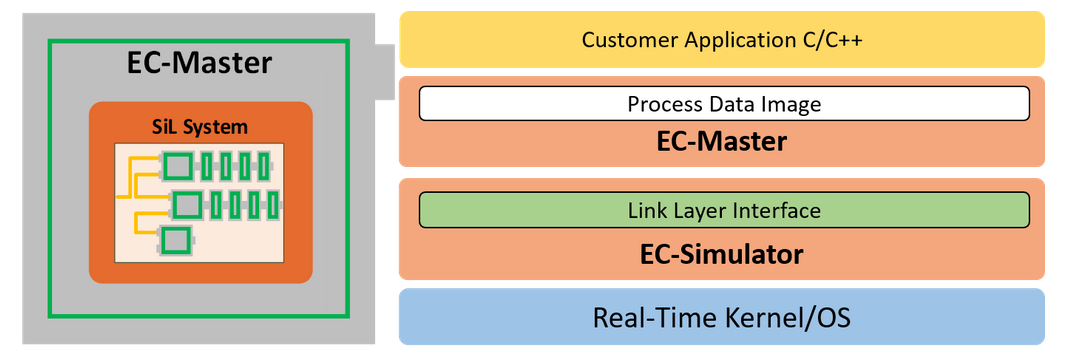
Software-in-the-Loop (SiL) Simulation
The EtherCAT network is simulated by a software running on the System Under Test (SUT).
Instead of communicating with the Ethernet Controller, the EC-Master EtherCAT master is directly exchanging EtherCAT frames with the simulation software.
Software Architecture
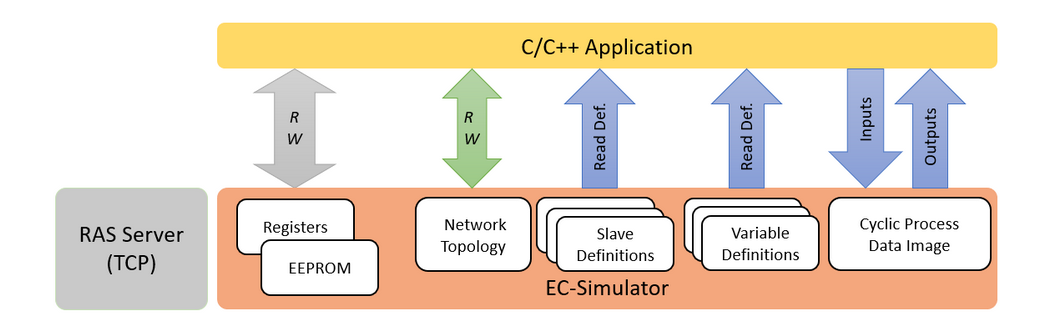
Programming Interface
Process Data Access
- API to enumerate the simulated slaves
- API to enumerate all available process data variables
- Process data image (memory) to access inputs and outputs
Network Operations
- Change the network topology
- Disconnect/connect/move a slave
- Power down/up a slave
- Change a slave state, e.g., switch to PreOp state
Diagnosis Functions
- API to read and write slave registers, e. g. read slave states
- API to read and write slave EEPROM content
- API to read simulator object dictionary
- API to evaluate the network topology
- RAS server for connecting EC-Lyser/EC-Engineer
Features
- Slaves with and without mailbox
- Mailbox protocol CANopen over EtherCAT (CoE)
- PDO configuration and assignment commands via CoE
- Support for all mailbox initialization commands
- Basic object dictionary
- Support for distributed clocks
- Supported Masters: EC-Master
Tecnologix offre supporto gestito direttamente dal Team di sviluppo.
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Abbiamo trovato altri prodotti che ti potrebbero interessare!