Utilizziamo i cookie per rendere migliore la tua esperienza di navigazione. Per rispettare la nuova direttiva sulla privacy, è necessario chiedere il tuo consenso per impostare i cookie. Per saperne di più.



EC-Win provides a professional open real-time EtherCAT platform for Windows systems. Thus it is possible to create extremely fast, deterministic real-time solutions that are based on the more and more popular EtherCAT technology. Typical applications are motion controllers, PLC controllers or real-time measurement applications with cycle times up to 20 kHz. Core component of EC-Win is the powerful EC-Master Stack which was specifically optimized to match with the proven and reliable acontis Windows Hypervisor and real-time technology, respectively.
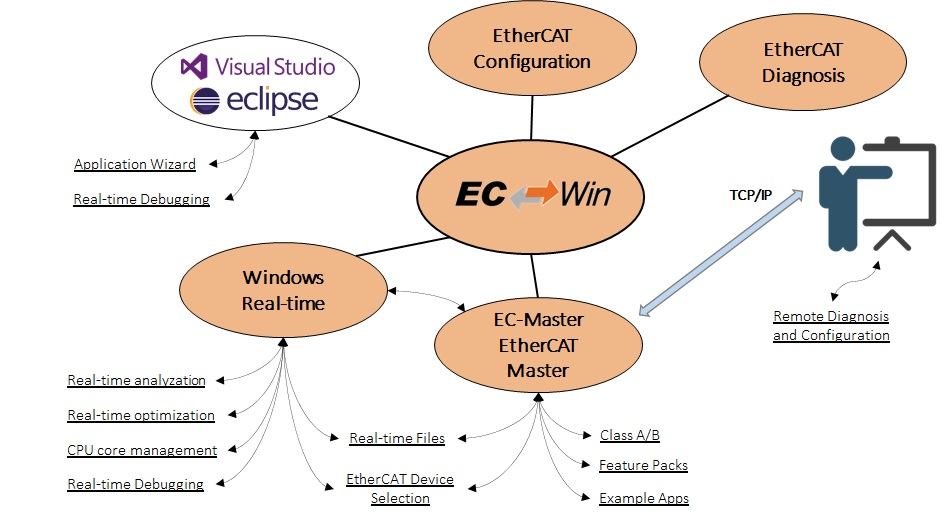
Customers get a perfectly matching, powerful real-time EtherCAT programming environment; a one-stop, single-source solution with an attractive price. Typically, multicore systems will be used as hardware platform. Windows then runs on separate CPU cores as the EtherCAT master and real-time application run. Fast and optimized drivers for Intel and Realtek network controllers ensure highest possible performance. Also integrated into the EC-Win hypervisor platform is the option to synchronize EtherCAT slaves with the real-time application; the local PC timer will run synchronously with the EtherCAT slaves that are using Distributed Clocks. EC-Win is complemented with the EC-Engineer configuration, diagnosis and monitoring tool. Microsoft Visual Studio is used as integrated development and debug environment for both, the Windows part as well as the real-time/EtherCAT part of the application. Using EC-Win customers get a means to avoid costly plug-in cards as well as separate hypervisors or Windows real-time extensions.
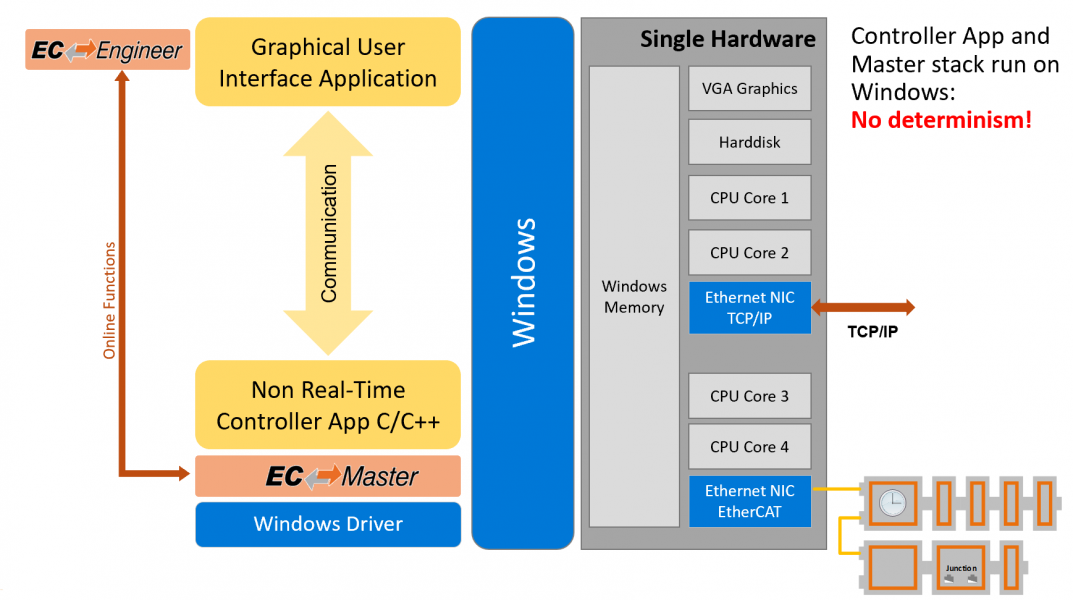
Windows native System Architecture
When running EtherCAT natively on Windows, the controller application, the master stack and the interface to the EtherCAT network via the Ethernet NIC all fully rely on Windows. While the average response on this architecture would be sufficient for most applications, the shortest best case achievable cycle time for EtherCAT cannot be set faster than 1 millisecond. This theoretically could be feasible for many applications, but the lack of deterministic real-time behavior makes such design impracticable for almost all applications. In practice, depending on Windows load, jitter of 50 milliseconds or more will arise.
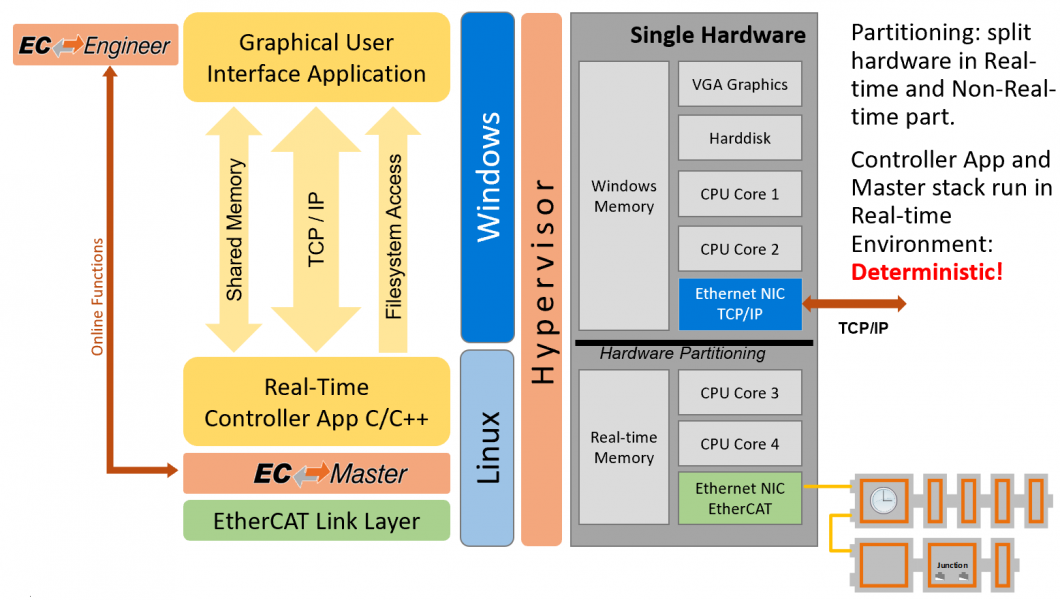
Real-time System Architecture
The underlying real-time solution, contrary to what users might be led to believe, does not make Windows itself a real-time OS (RTOS). Existing Windows applications are not automatically going to behave like real-time applications when a Windows real-time extension is implemented.
The acontis Windows real-time extension uses a segregated approach for the real-time applications and the non-real-time Windows part. Rather than using a proprietary RTOS or real-time environment, this solution embeds a standard real-time environment on top of a hidden real-time hypervisor solution. This hypervisor environment is key and ensures much better isolation from Windows compared to traditional real-time extensions.
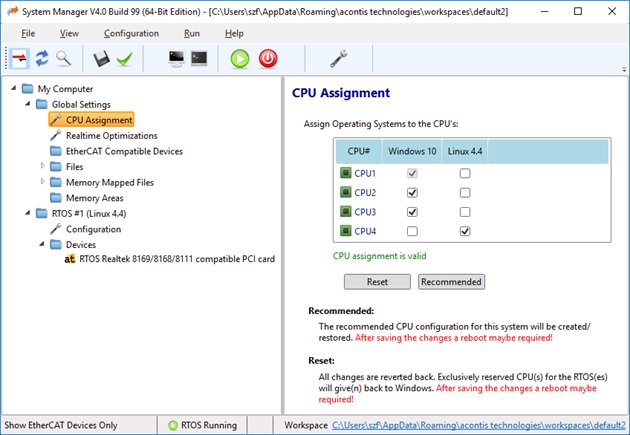
The EC-Win System Manager
- One stop configuration tool for EC-Win
- Assign EtherCAT compatible hardware to the real-time environment
- Optionally assign additional hardware to the real-time environment
- GUI based CPU assignment and memory configuration for Windows and the real-time environment
Real-time Platform
- Integrated hypervisor: Windows and the real-time part (operating system) are safely separated. Protection against Windows system failure (blue screen).
- Standard POSIX support for the real-time part (preemptive multitasking, threads, events, semaphores, mutexes, ...).
- 32 Bit or 64 Bit support, independent from Windows bit size
- Fast high resolution system timer (resolution below 10 nanoseconds). Interrupt frequencies up to 20 kHz can be achieved.
- Using multiple CPU cores for both, Windows and/or the real-time part is possible (SMP: symmetric multiprocessing). This is especially important for quad core CPUs etc.
- Virtual TCP/IP network between Windows and the real-time part. Thus the full functionality of the EtherCAT diagnosis features can be used.
- Comfortable development and debugging environment using Microsoft Visual Studio. Remote debugging via Ethernet is possible.
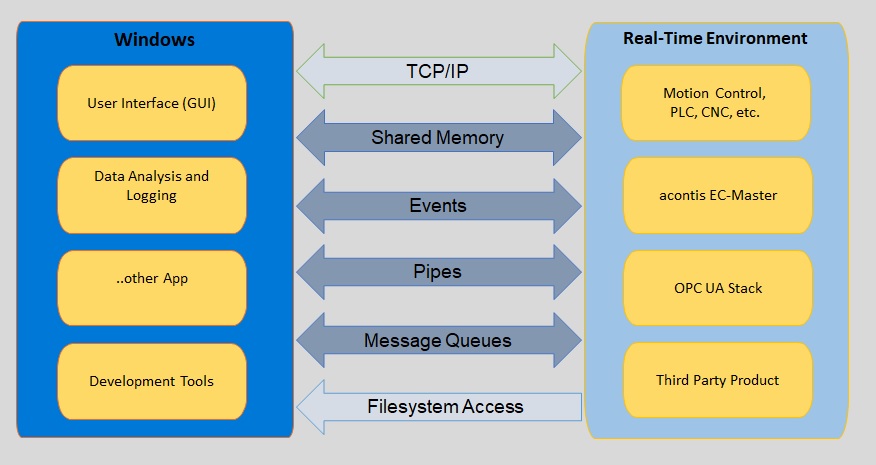
Windows/Real-time interaction
EtherCAT Master Configuration
- Configuration files of the standardized ENI format (EtherCAT Network Information) are supported, all compatible configurators can be used.
EtherCAT Master Run Time
- EC-Master Stack SDK with Class A functionality.
- Fast and real-time optimized drivers for Intel and Realtek network controllers. These drivers don't require interrupts which on one side provides excellent real-time behavior and on the other side smoothly integrates into the Windows/real-time environment.
- Standard mailbox protocols: CoE - CAN application protocol over EtherCAT, SoE - Servo Profile over EtherCAT, AoE - ADS over EtherCAT, VoE - Vendor over EtherCAT.
- Distributed clocks with propagation delay measurement and compensation, synchronization of the local real-time timer and EtherCAT Distributed Clocks reference clock, continous drift compensation. This feature is important for many EtherCAT motion applications.
- Slave to slave communication via master.
- Bus scan with topology detection, analysis and verification.
- EEPROM programming (read and write).
- Comprehensive and proven diagnosis.
- Integrated EC-Master feature pack "Remote Access Server". Using the virtual network connection a simple remote access to the EC-Master stack is provided.
- Option: more EC-Master Stack Feature Packs are provided for an attractive price.
EtherCAT Master Diagnosis
- EC-Lyser: Graphical application which was developed to analyze EtherCAT field bus systems that are controlled by the acontis EC-Master Stack.
- Option: Remote Access from Windows via TCP/IP (virtual network) for sophisticated diagnosis in conjunction with the EC-Master Object Dictionary.
Tecnologix offre supporto gestito direttamente dal Team di sviluppo.
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Abbiamo trovato altri prodotti che ti potrebbero interessare!



