Utilizziamo i cookie per rendere migliore la tua esperienza di navigazione. Per rispettare la nuova direttiva sulla privacy, è necessario chiedere il tuo consenso per impostare i cookie. Per saperne di più.


RANGE OPTIONS
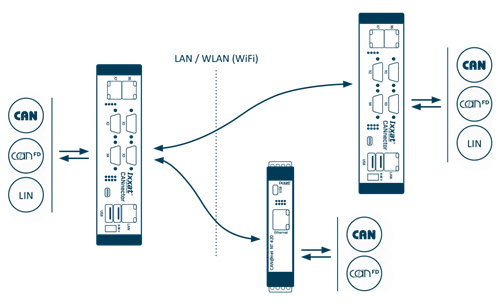
Preconfigured range operations
- Bridging of all 6 CAN channels via Ethernet (2 devices requires – master/slave)
- Supported CAN baudrate 250 Kbit/s
- 4 configurations supporting CAN baudrates up to 1000 kbit/s
- Permanent data transmission without trigger or filtering
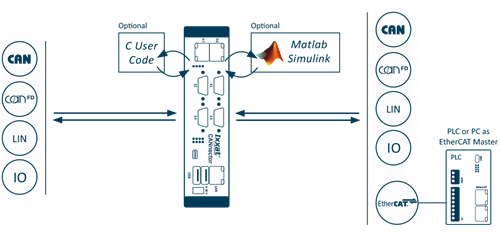
Advanved features via user configuration (using ACT)
- Range extension for CAN, CAN FD and LIN data
- Signal based operation (based on imported bus description files)
- Forwarding individual messages and/or signals
- Modification of message ID and content
- Data manipulation via own C-Usercode or MATLAB/Simulink models
- Possibility to create own Messages based on signals from every CAN bus
- Export of CANdB’s in case of the creation of own messages
- Low power sleep mode and switch-on on CAN(FD)
- Parallel data storage on USB memory, PC or cloud
- Remote device management (OPC UA, HMS-HUB)
- LAN/USB/WLAN (optional WLAN module required) access for signal visualization/stimulation
BRIDGE OPTIONS
Preconfigured bridge operations
- Bridging of all 6 CAN buses
- CAN 1 to CAN 2 and vice versa
- CAN 3 to CAN 4 and vice versa
- CAN 5 to CAN 6 and vice versa - Supported CAN baudrates 125 kbit/s, 250 kbit/s, 500 kbit/s, or 1000 kbit/s –depending on selection
Advanved features via user configuration (using ACT)
- Bridging of CAN, CAN FD, EtherCAT and LIN data
- Signal based operation (based on imported bus description files)
- Forwarding individual messages and/or signals
- Modification of message ID and content
- Data manipulation via own C-Usercode or MATLAB/Simulink models
- Possibility to create own Messages based on signals from every CAN bus
- Export of CANdB’s in case of the creation of own messages
- Low power sleep mode and wake-up on CAN(FD)
- Parallel data storage on USB memory, PC or cloud
- Remote device management (OPC UA, HMS-HUB)
- LAN/USB/WLAN (optional WLAN module required) access for signal visualization/stimulation
CONFIGURATION AND OPERATION
CANnector Range and CANnector Bridge are preconfigured and can be used directly without further configuration. However, for customers which require specific functionality – e.g. with message filtering or signal based operation, HMS provides easy to use tools to use the bride or range extender “your” way.
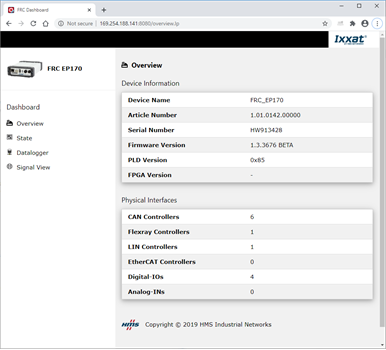
Dashboard
With the dashboard, that is accessible with a standard web browser via Ethernet, USB or WLAN (WiFi), the CANnector Range/Bridge and the connected bus systems can be monitored, the different basic configurations can be selected, started and stopped on the device and live data can be visualized.
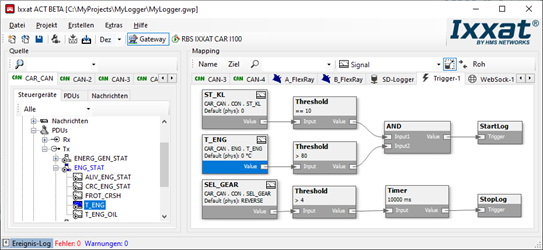
ACT Tool
ACT is Windows based and allows the easy creation of configurations with or without bus description files via drag and drop. The ACT tool provides further configuration possibilities (e.g. changing message content or signal values).
IxAdmin
IxAdmin is included in the ACT tool. With IxAdmin the different basic configurations can be selected, started, stopped and downloaded to the device. Changing baud rate settings is also possible.

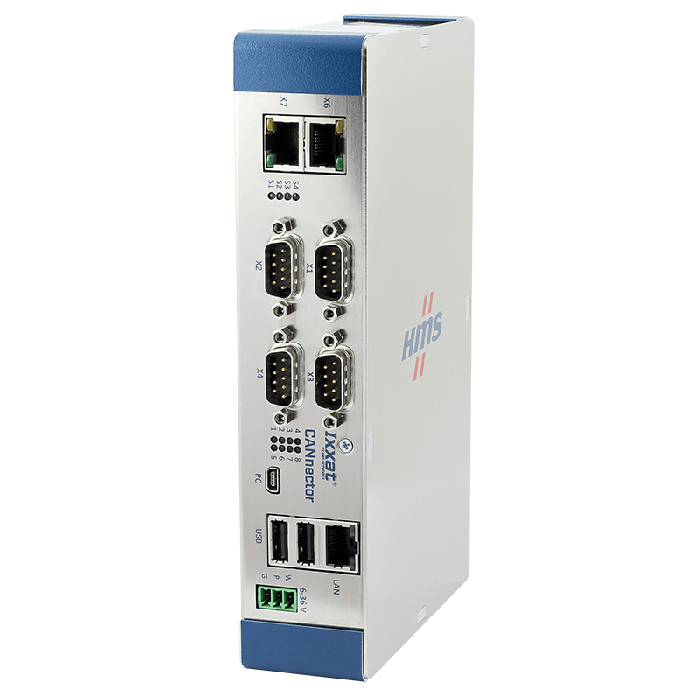
| Dimensions (L x W x H) | 196 x 113 x 43 mm |
| Protection class | IP40 |
| Weight | Approx. 790 g |
| Operating temperature | -40 °C to +80 °C |
| Power supply | 6-36 V DC |
| Current consumption | Typ. 420 mA at 12 V (sleep mode < 2 mA) |
| Housing material | Aluminum, stainless steel |
| Relative humidity | 10-95 %, non-condensing |
| Host system | Power PC, 256 MByte RAM, 256 MByte Flash |
| Ethernet | 10/100 MBit/s, RJ45 |
| USB | 2.0 high-speed device, USB-B 2.0 high-speed device, USB-A |
| CAN FD transceiver | Microchip MCP2562FD |
| CAN RX only | Hardware switchable |
| CAN high-speed transceiver | Texas Instruments SN65HVD251 |
| CAN bus termination resistor | High-speed/CAN-FD: none |
| LIN transceiver | NXP TJA1020 |
HIGHLIGHTS
- Up to 6 CAN buses (thereof 2 CAN FD)
- Supports CAN listen only (CAN RX)
- Switch-on CAN (self switch on in case of any CAN communication or a defined message)
- Extensive filter and mapping options
- Extendable by own C-Code or Matlab/Simulink models
- Easy cloud connection
- Very low latency in classical gateway applications
- Easy access via USB, LAN, WLAN/WiFi, 4G
- Compatible to the Ixxat CAN@net Generic Ethernet protocol and CAN@net NT protocol
- Plug&Play, but also configurable/programmable
- Standalone operation
- Extended temperature range (-40 °C to 80 °C)
- Galvanic isolation
- DIN rail mountable
| 1.01.0091.02000 | CANnector Range * |
| 1.01.0091.03000 | CANnector Bridge * |
Tecnologix offre supporto gestito direttamente dal Team di sviluppo.
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui